In industrial UAV applications, Multi-rotor Drone High Quality is fundamentally defined by how well the system maintains stable flight under continuously changing aerodynamic and load conditions. Whether deployed in firefighting missions, infrastructure inspection, or heavy payload transport, performance is ultimately determined by propulsion efficiency, control precision, and system-level integration rather than isolated component specifications.

Modern multi-rotor platforms are expected to operate in environments where wind disturbance, payload variation, and thermal stress occur simultaneously. In these scenarios, even small inefficiencies in motor output or ESC response can accumulate into noticeable flight instability or reduced mission endurance.
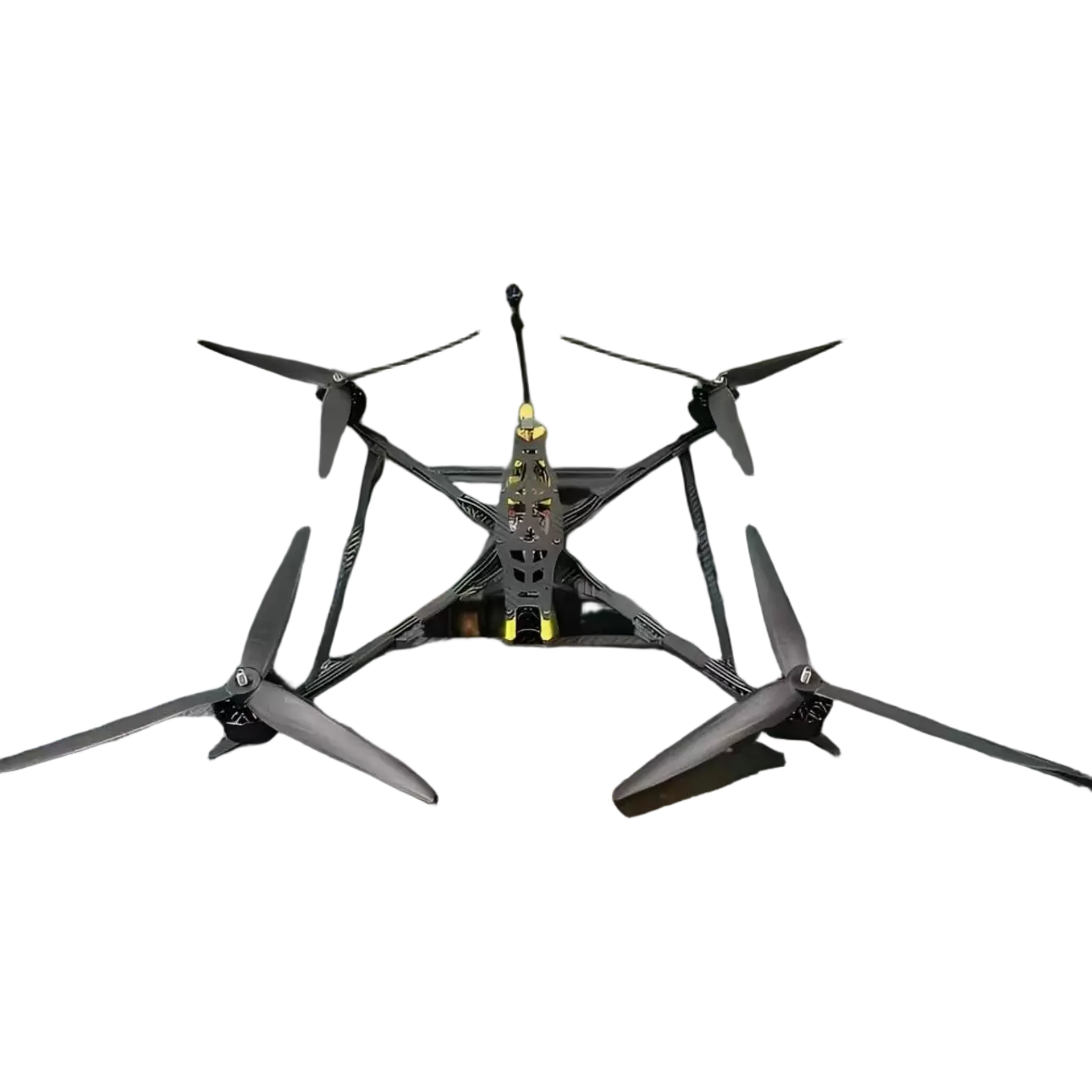
Propulsion System Defines Core Flight Capability
At the center of any Multi-rotor Drone High Quality system is the propulsion chain composed of:
- brushless DC motors
- electronic speed controllers (ESC)
- propellers
- power distribution architecture
Among these, the motor determines thrust stability, while the ESC defines response accuracy.
Typical industrial-grade parameters include:
- motor KV range: 100–500 KV for heavy-lift configurations
- continuous current capability: 20A–120A+ depending on payload class
- thrust-to-weight ratio: 2:1 to 5:1 in mission UAV systems
Firefighting drones, for example, experience abrupt payload changes during water or foam release. Without stable torque compensation, these changes can introduce transient altitude deviation and attitude instability.
Thrust Stability Under Real Flight Conditions
Unlike controlled laboratory conditions, real-world UAV operation introduces dynamic disturbances such as:
- gust wind shear during low-altitude flight
- asymmetric payload loading
- rapid acceleration and deceleration cycles
- voltage drop during high current draw
A high-quality multi-rotor system must maintain thrust linearity even when input conditions are unstable.
This is achieved through:
- low cogging torque motor design
- high-density stator winding optimization
- precision magnetic field alignment
ESC systems further enhance stability using:
- high-frequency PWM switching (up to 96 kHz in advanced systems)
- closed-loop current control
- real-time motor synchronization
These mechanisms ensure thrust output remains predictable across all operating conditions.
Energy Efficiency and Endurance Engineering
Flight endurance is a direct function of system efficiency. In Multi-rotor Drone High Quality systems, energy optimization is not achieved through battery capacity alone, but through holistic propulsion efficiency.
Key efficiency factors include:
- motor efficiency peaks between 85%–92%
- aerodynamic optimization of propeller blade geometry
- total system weight distribution
- power loss minimization in ESC conversion
A 3–5% efficiency gain at propulsion level can significantly extend mission duration, particularly in heavy-load firefighting operations where endurance directly impacts operational coverage area.
Thermal Management Under Continuous Load
High-power UAV systems generate significant heat across motors, ESCs, and battery modules. Without proper thermal control, performance degradation occurs rapidly.
Typical safe operating ranges:
- motor: 60°C–90°C
- ESC: below 100°C
- battery: 20°C–45°C optimal window
Thermal design strategies include:
- aluminum heat-dissipating motor housings
- optimized airflow along arm structures
- high-temperature insulation materials (Class F/H)
- adaptive ESC thermal throttling
Thermal imbalance between motors can also lead to asymmetric thrust, making system-level heat management critical.
Structural Vibration Control
Vibration is a major factor affecting UAV stability and sensor accuracy. Sources include:
- rotor imbalance
- frame resonance
- airflow turbulence under payload variation
High-quality systems mitigate vibration using:
- carbon fiber airframe structures
- precision-balanced propellers
- rigid motor mounting architecture
- isolated flight controller mounting systems
Excessive vibration impacts not only flight stability but also imaging systems and navigation accuracy.
Flight Control and Sensor Fusion
Modern UAV systems rely on integrated flight controllers that process multiple sensor inputs:
- IMU (gyroscope + accelerometer)
- barometer
- magnetometer
- GPS / RTK positioning
Control loop frequencies typically range from 500 Hz to 1 kHz, enabling real-time stabilization under external disturbance.
Sensor fusion algorithms ensure:
- attitude correction during wind disturbance
- position hold accuracy in GPS-challenged environments
- stable transition between flight modes
Battery Behavior Under High Load Demand
Battery systems are often the limiting factor in UAV performance.
Key specifications:
- discharge rate: 10C–25C for industrial drones
- energy density: critical for payload-to-endurance balance
- voltage stability under peak load conditions
Voltage sag during high thrust demand can directly reduce motor performance, making battery quality a key determinant of overall system reliability.
Environmental Reliability in Field Operation
Industrial UAVs must operate under:
- high humidity
- dust or smoke exposure
- temperature extremes (-20°C to +50°C)
Protection measures include:
- IP-rated enclosures
- sealed motor bearings
- corrosion-resistant coatings
- conformal-coated electronic boards
Environmental robustness directly determines mission success rate in real deployments.
Company Capability Integration
Companies such as Jiangxi BonSure Technology Co., Ltd integrate firefighting UAV design with high-performance brushless motor systems, ensuring optimized propulsion and structural coordination for industrial-grade multi-rotor platforms.
Conclusion
Multi-rotor Drone High Quality systems are defined by propulsion stability, thermal resilience, vibration control, and integrated flight intelligence. As UAV applications expand into critical industrial domains, system-level engineering becomes the key driver of reliability and performance consistency.